News Story
NanoCenter members create tiny inchworm motor with flexible arms
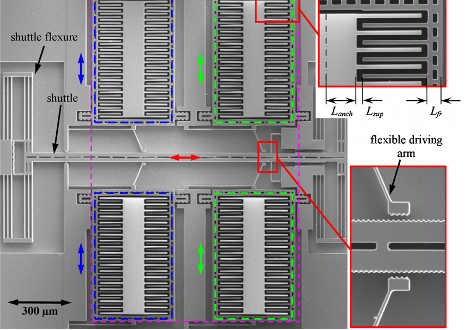
Flexible arms help the shuttle (center) of this nanomotor move.
"These motors can be used to someday power a tiny insect-sized robot or provide autofocus and zoom in a smartphone camera." -- Ivan Penskiy, UMD Engineer
A tiny creeping motor is easy to manufacture and stronger than ever
Just as a person would grab and pull a rope hand over hand, a new micromechanical motor developed at the University of Maryland pulls a tiny silicon beam with enough force to lift a toothpick.
Assistant Professor Sarah Bergbreiter (ME/ISR) and her student Ivan Penskiy of the University of Maryland, College Park, developed an inchworm motor that is simple to manufacture and provides significantly greater force than similar efforts. Flexible arms are used to alternately grab and pull a tiny silicon beam thousands of times per second, moving only a couple micrometers at a time. This action is similar to that used in muscle. These motors can be used to someday power a tiny insect-sized robot or provide autofocus and zoom in a smartphone camera.
The motor is also very efficient due to its use of electrostatic actuation, in which two tiny silicon plates are pulled toward each other when a voltage is applied. Penksiy and Bergbreiter optimized the layout of these plates along with the flexible arms that they drive to improve efficiency in addition to force output. The researchers made the device in the University of Maryland’s Fab Lab, where only a single etch was required to pattern these plates and flexible arms on a silicon chip.
The researchers will next work on integrating this motor with mechanical structures like legs along with tiny power supplies for integrated microrobots.
Published January 10, 2013
Recent Stories
Stories / Apr 14, 2025
MATRIX-Affiliated Faculty Solving Tomorrow's Challenges Today

Stories / Apr 8, 2025
Maryland Engineering: Top 10 Among Public Graduate Programs, 7...

Stories / Apr 2, 2025
Tuna-Inspired Mechanical Fin Could Boost Underwater Drone Power

Stories / Mar 20, 2025
MATRIX Lab Establishes Industry Advisory Board

Stories / Mar 10, 2025
Developing Efficient Systems for Deep Sea Exploration

Stories / Mar 3, 2025
The Clark School Celebrates Women and Multiracial Engineers and...

Stories / Dec 10, 2024
Looking A“Head” to the Future of Autonomous Robots
Stories / Dec 9, 2024
Autonomy Summit Explores Potential and Challenges of AI

Stories / Nov 25, 2024
UMD Researchers Win Best Paper Award at IROS 2024

Stories / Nov 13, 2024
Maryland Engineers Take On Big Challenges in Medicine
