News Story
S.K. Gupta wins NSF grant for human robot collaboration in manufacturing
Professor S.K. Gupta (ME/ISR) is the principal investigator for a three-year, $640K National Science Foundation National Robotics Initiative grant, “ A Proactive Approach to Managing Contingencies during Human Robot Collaboration in Manufacturing.”
Recent advances in human-safe industrial robots present an opportunity for creating hybrid work cells, where humans and robots can collaborate in close physical proximities. This capability enables realizing systems that utilize complementary strengths of humans and robots. Several new low-cost robots have been introduced in the market over the last few years, making them attractive in many new manufacturing applications. This makes the idea of hybrid cells economically viable for small and medium manufacturers, which represent a very important segment of the manufacturing sector in the United States. Both humans and robots can make errors in a hybrid cell, hence creating contingency situations. Unless handled promptly, a contingency situation may lead to significant operational inefficiencies. Hence, hybrid cells are not likely to cost-effective unless contingency situations are proactively detected and managed. This National Robotics Initiative (NRI) award supports fundamental research to enable proactive management of contingencies arising during human-robot collaboration in hybrid work cells in small production volume manufacturing operations. Results from this research will enable introduction of industrial robots in small production volume operations and are expected to make US manufacturing industry cost competitive in the global market. The integration of the research with graduate and undergraduate courses will enhance the robotics and manufacturing curricula and enrich learning experiences of the participating students. Outreach activities will educate and inform K-12 students about career opportunities in robotics and manufacturing.
Fundamental advances are needed in automated planning, cell monitoring, replanning, and human-robot interaction to endow hybrid cells with effective contingency handling capabilities. This research will investigate computational foundations for the design of task planning and resource allocation algorithms that explicitly account for managing contingencies. Algorithms will be developed for real-time monitoring of the task progress to ensure that tasks are completed in a safe and efficient manner. Real-time replanning algorithms will be designed to handle contingencies and refine plans based on the observed task execution performance. This research will also explore and characterize methods for effective information exchange between humans and robots to deal with contingencies.
Published September 1, 2015
Related Stories
Stories / February 19, 2019
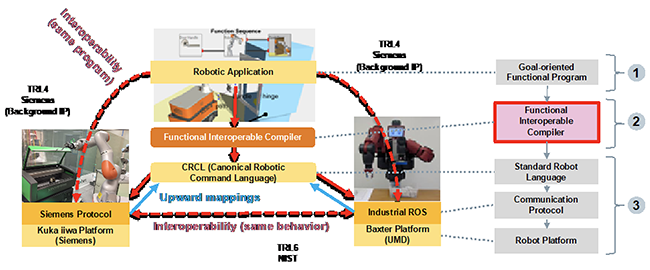
Regli is co-PI for ARM functional interoperable compiler project
Stories / December 16, 2016
S.K. Gupta leads finalist group in KUKA Innovation competition

Stories / September 8, 2015
Building a smarter industrial robot
Stories / September 1, 2015
Gupta is PI for NSF NRI unmanned surface vehicle grant

Stories / July 6, 2015
Alum Ashis Banerjee joining University of Washington faculty

Stories / August 10, 2014
Students present final projects for 2014 NSF Microrobotics REU
Stories / May 21, 2014
Greg Krummel wins Outstanding Research Award for Robo Crab
Stories / April 7, 2014
S.K. Gupta interviewed for robotics story in The Economist
Stories / May 9, 2013
Sagar Chowdhury wins ISR graduate student award

Stories / April 30, 2013
Pioneering flight of ‘Robo Raven’ is major breakthrough for...